



机器人特细金属腱绳
腱绳传动是最具应用潜力的灵巧手传动方案之一。机器人灵巧手从结构和功能上参考人手,能够灵活操作对象,实现对物体的灵活抓取,满足多种工作需求。人手的自由度度超过20个,部分灵巧手的自由度与人手接近,即具有20个或以上的自由度。灵巧手的常见传动方式有腱绳传动、连杆传动、齿轮传动、带传动等,其中腱绳传动是最具应用潜力的方案之一。腱绳在一定程度上模拟了人手的肌腱结构,使得大型的驱动器远离了执行机构,减轻末端的负载和惯量,提升了抓取的速度,灵活性大大提升。同时腱绳适用于空间狭小且需要驱动自由度数目较多的传动场合,较连杆等传动方式更节省空间。
绳驱对腱绳要求较高,钢丝绳是较优选择。腱绳的机械特性、数量以及在手指中的路径设计对于灵巧手的性能具有较大影响,腱绳需配合驱动方案进行选型。一般而言,灵巧手腱绳需要高强度与耐久性、抗蠕变、较小的折弯半径、抗腐蚀、良好的柔韧性等,钢丝绳没有内摩擦,且与滑动表面的摩擦系数较小,同时强度高,可提供较大承载力,是腱绳材料较优选择。从材料和工艺看,钢丝绳常见的材料有碳素钢丝绳、不锈钢丝绳、镀锌钢丝绳、合金钢丝绳等,钢丝绳通常用多股绞合形成线缆,以达到更优的性能。手术机器人线绳与灵巧手工况类似,通常采用钨钢丝绳,具有优异的断裂强度和超长的循环寿命。
在手术机器人应用中,钨钢丝绳最常用的规格有两种
19X19
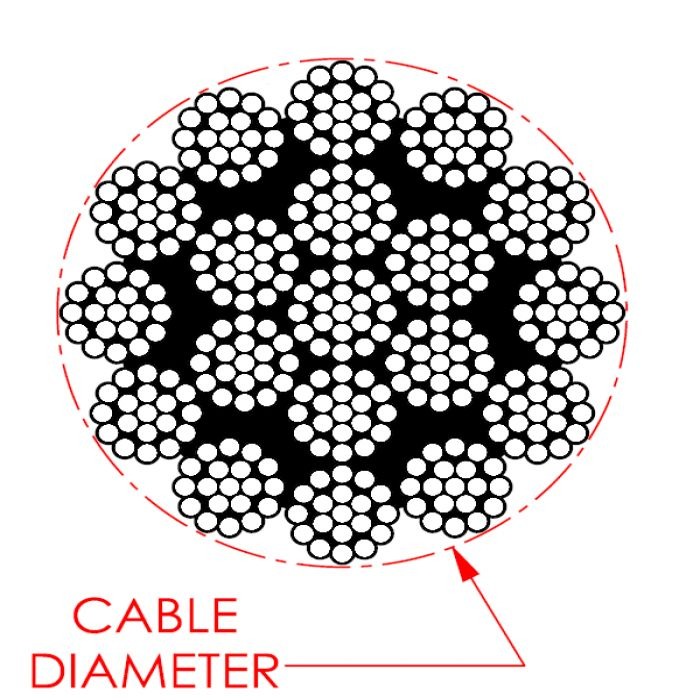
外科机器人中最常用的钨钢丝绳结构。该电缆结构由361根独立的细丝组成。根据电缆的最终直径,这些细丝的直径可能小至0.0005英寸。之所以这种结构在外科机器人中如此常见,是因为它具有出色的柔韧性和抗拉强度。
19X37
另一种比较常用钨钢丝绳结构,在各种结构中具有最高的柔韧性和最低的抗拉强度。19x37电缆由19根1x37的绞线组成。每根1x37绞线首先由1x7绞线制成,然后再制成1x19绞线,最后完成1x37绞线。这些1x37绞线随后被绞合成7x37结构,最终形成19x37的完整电缆。这种包含703根细丝的电缆可以使用直径小至0.0005英寸的细丝。